Programas
 Sliding down an arbitrary curve in the presence of friction,
Sliding down an arbitrary curve in the presence of friction,
F. González-Cataldo, Gonzalo Gutiérrez and Julio Yáñez.
American Journal of Physics 85, 108 (2017). Available on the arXiv.
Sliding With Friction
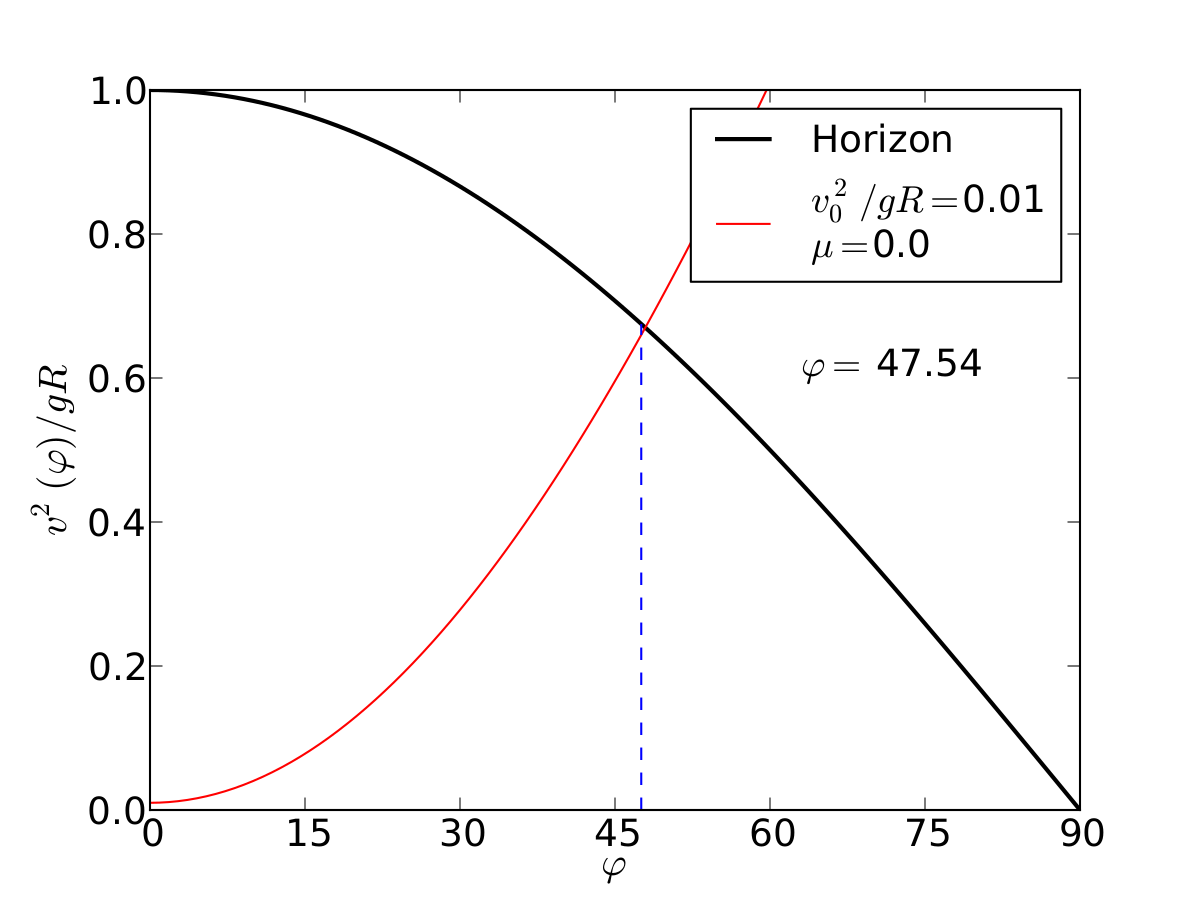
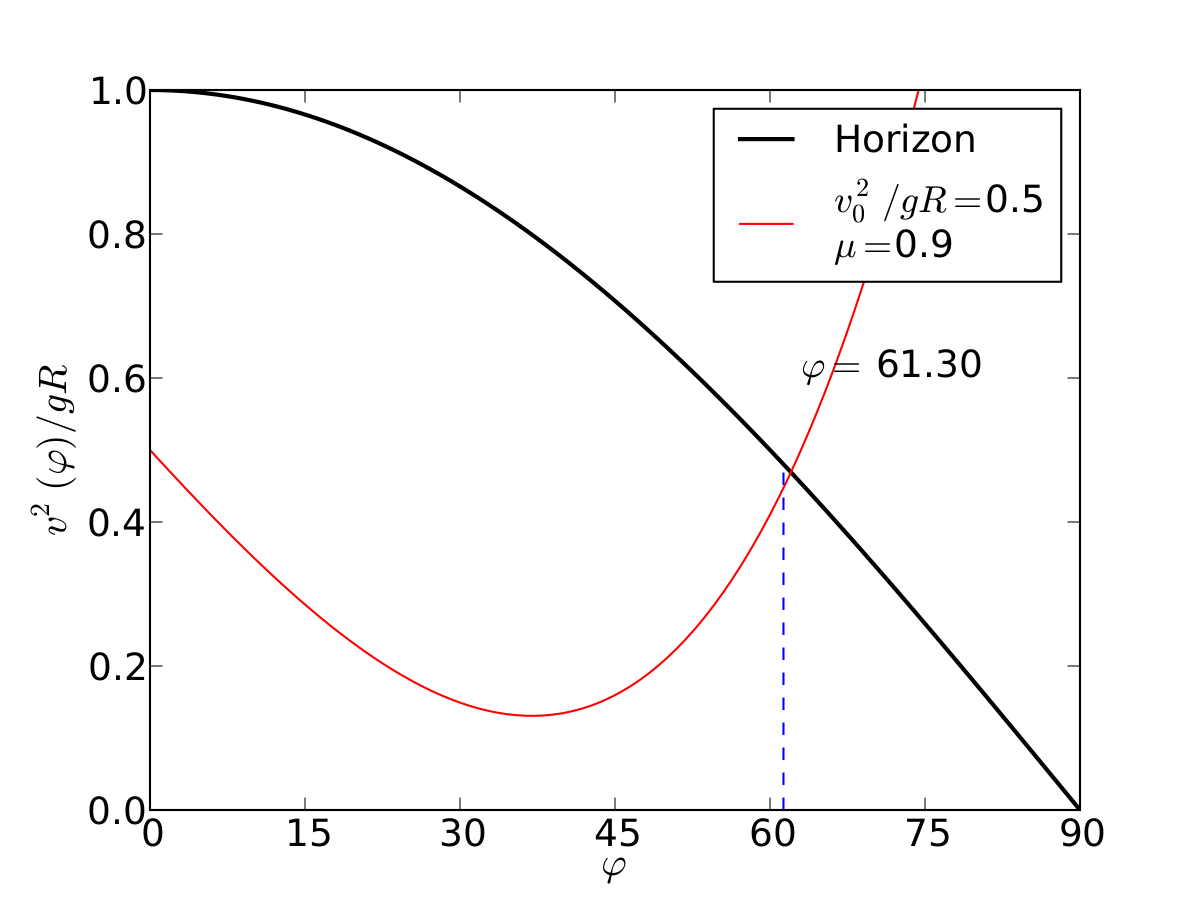
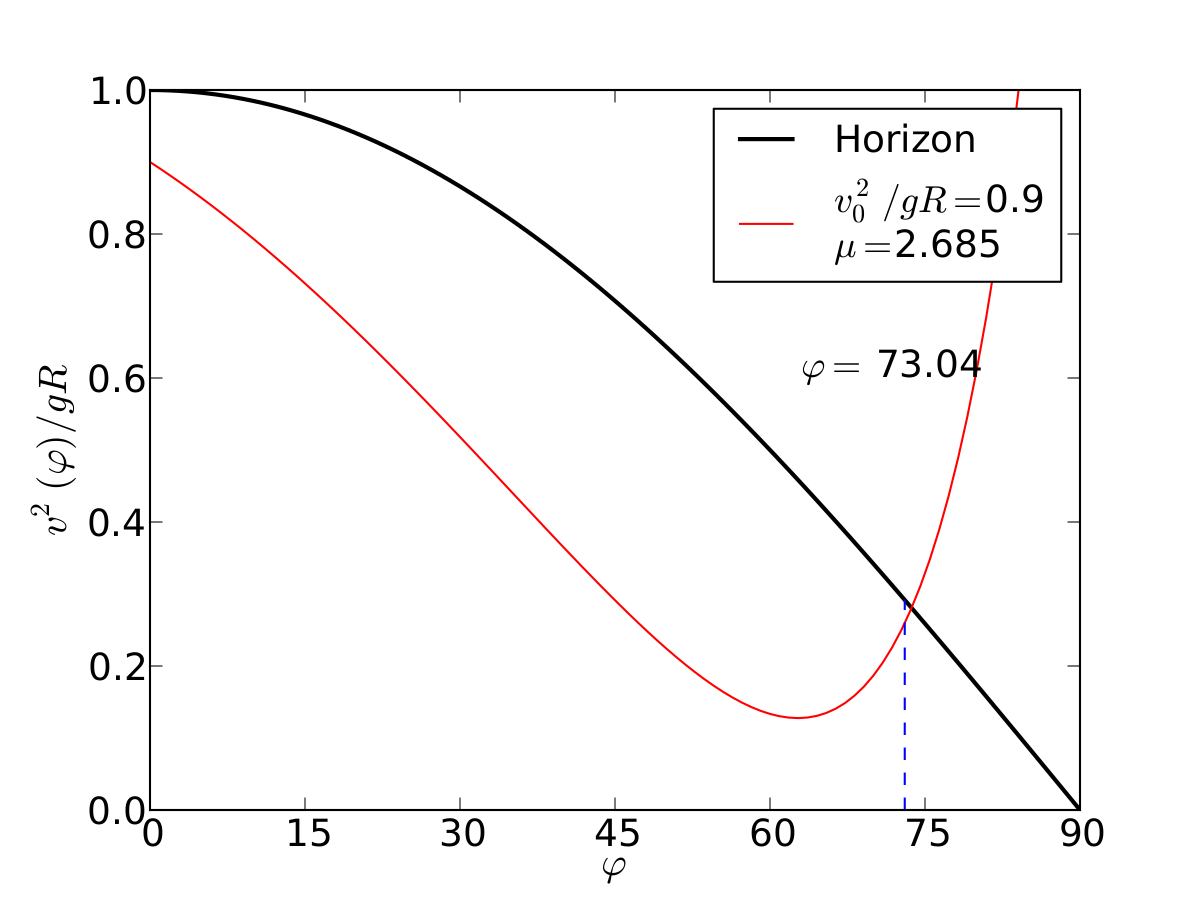
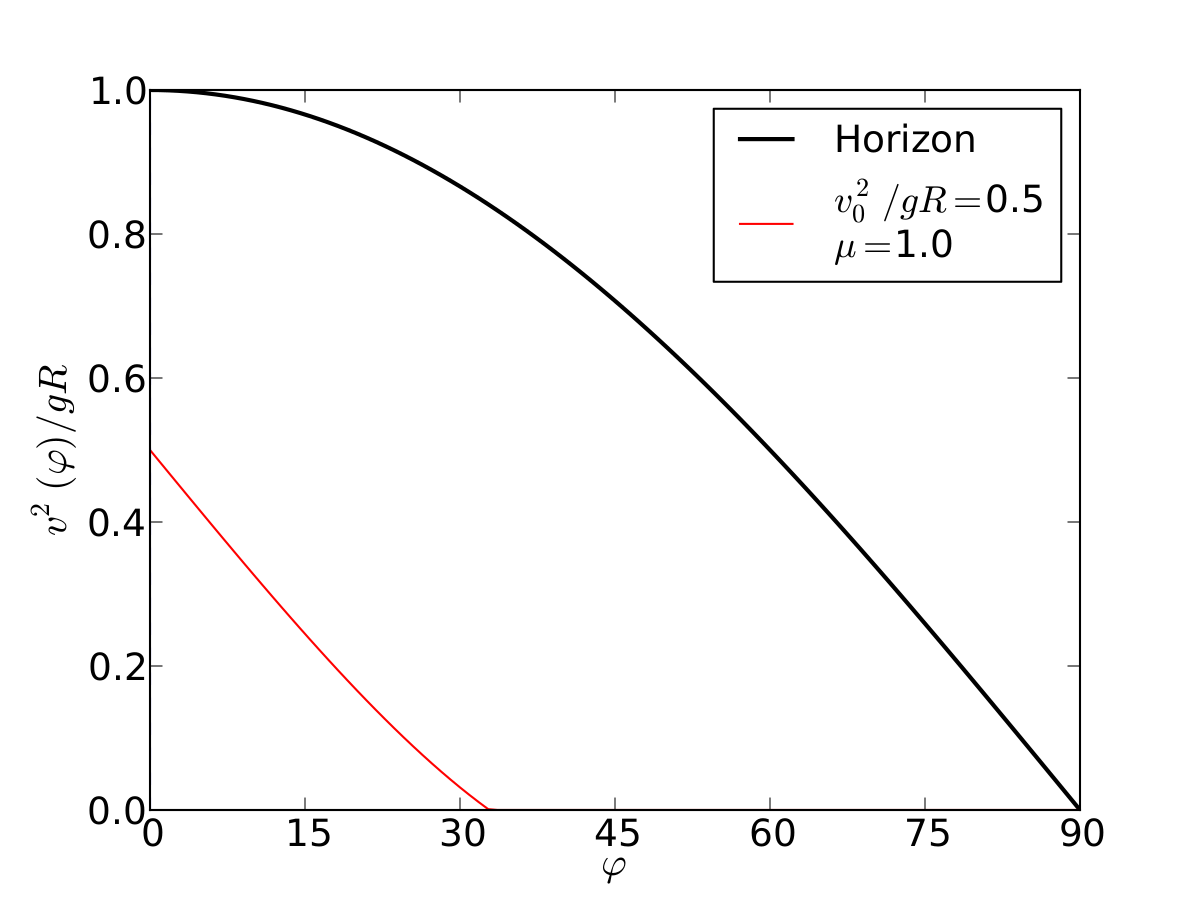
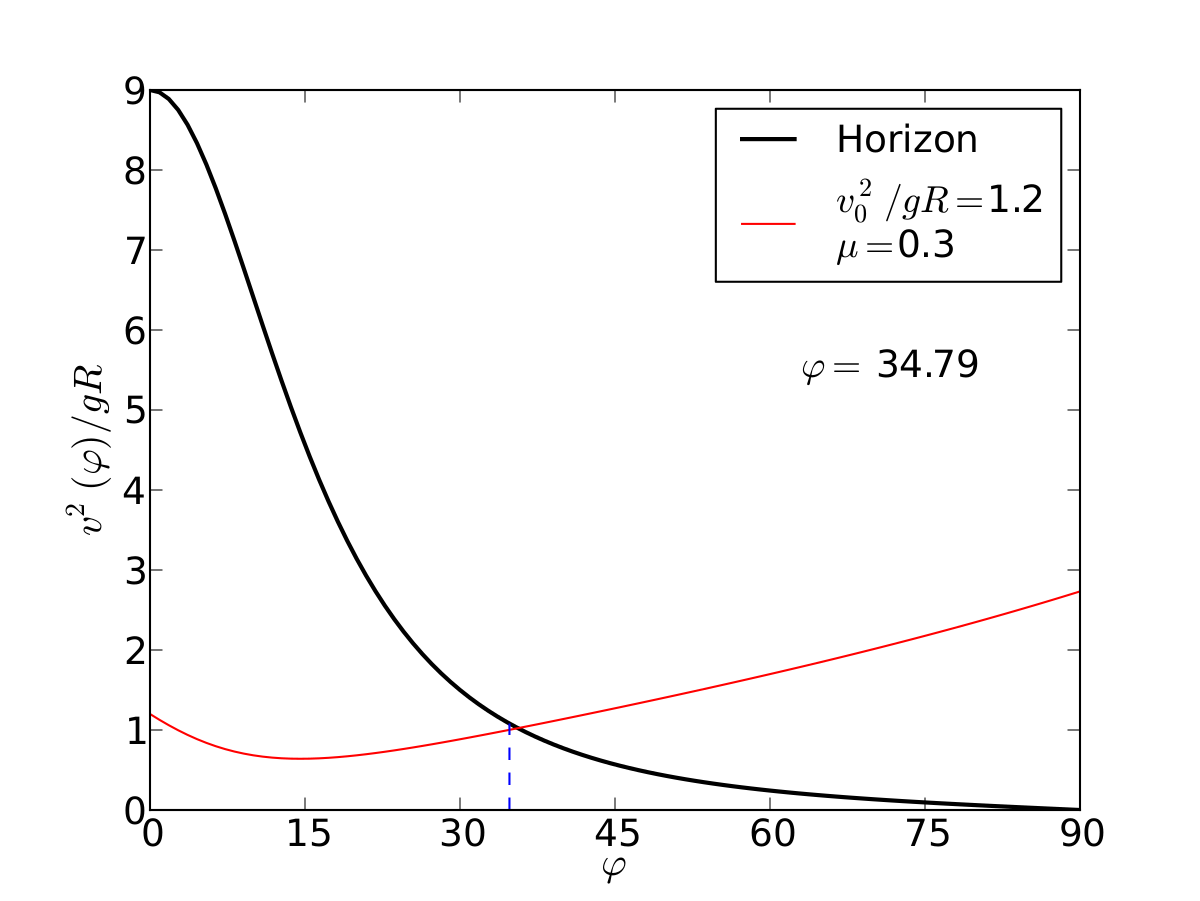
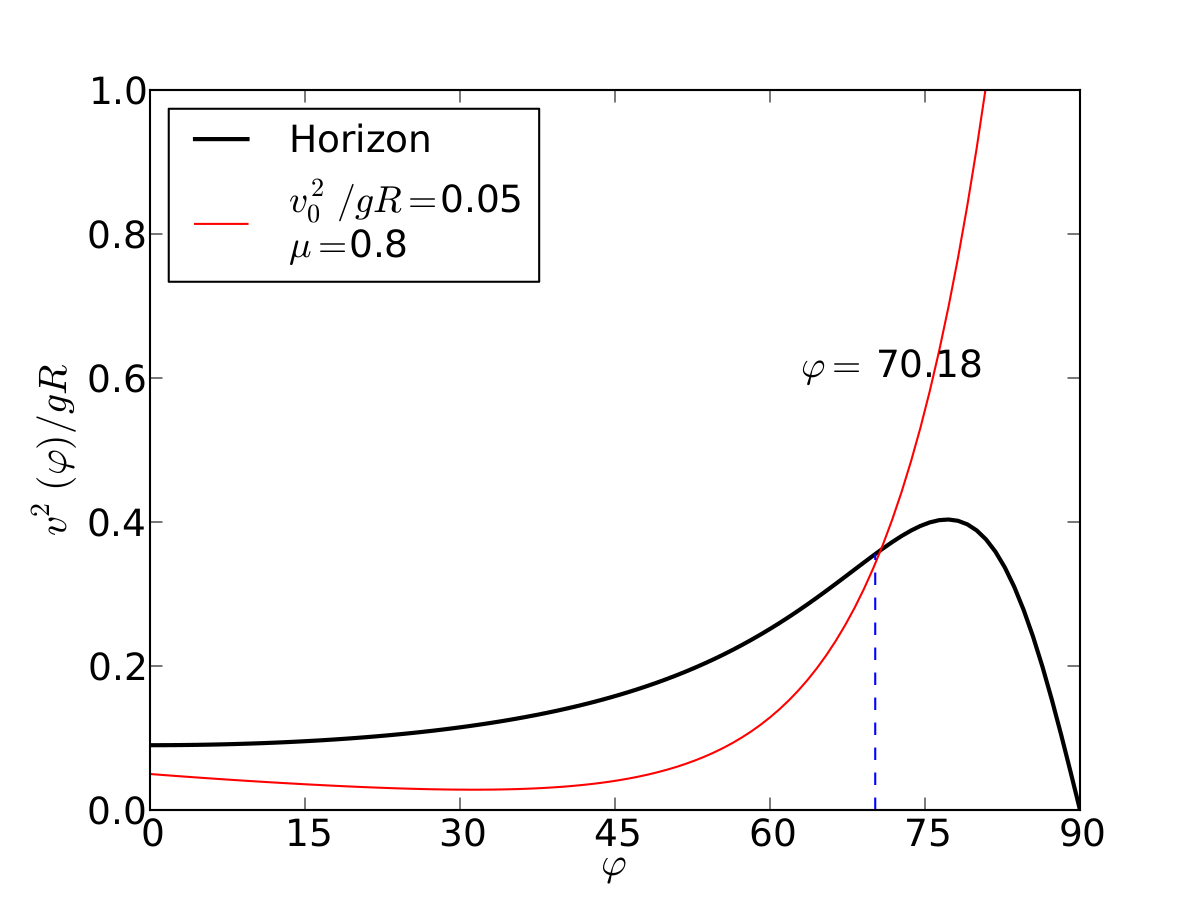
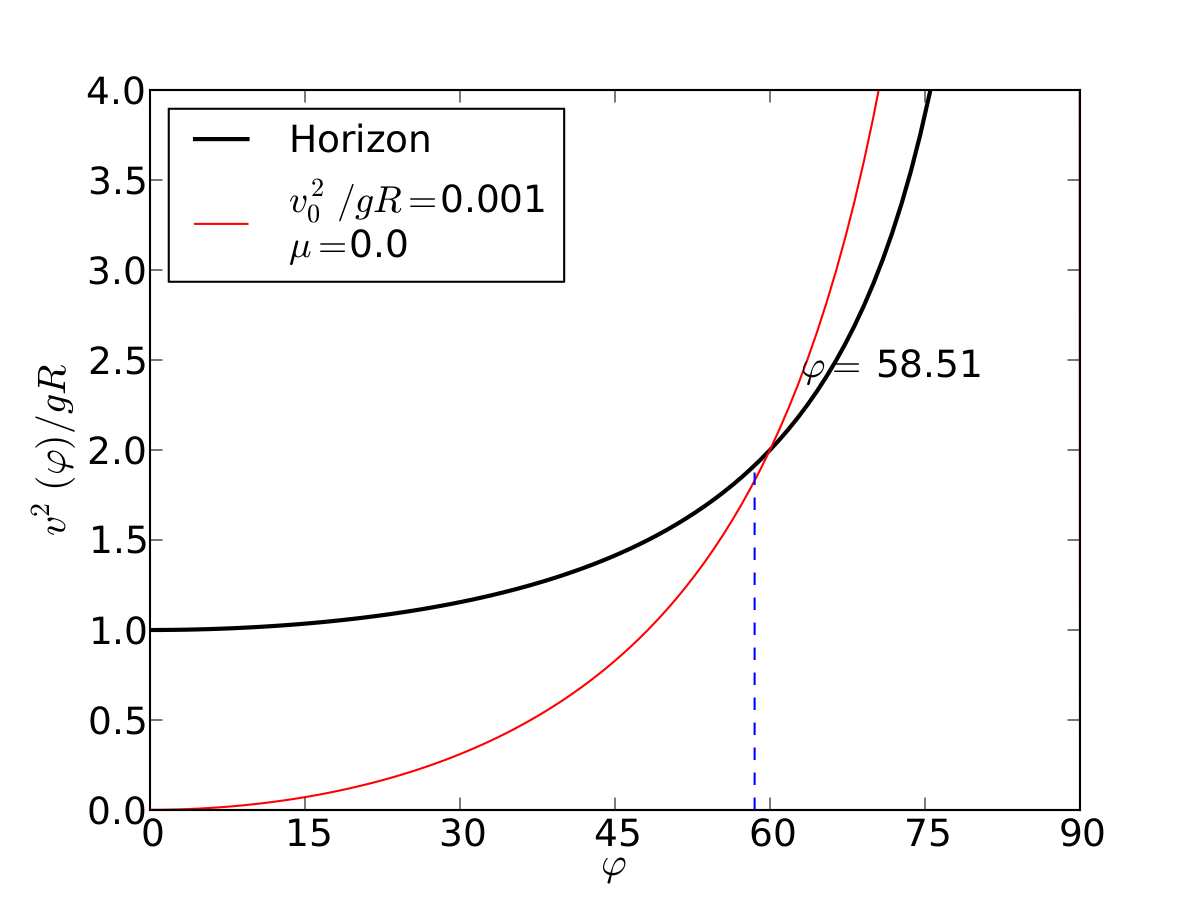
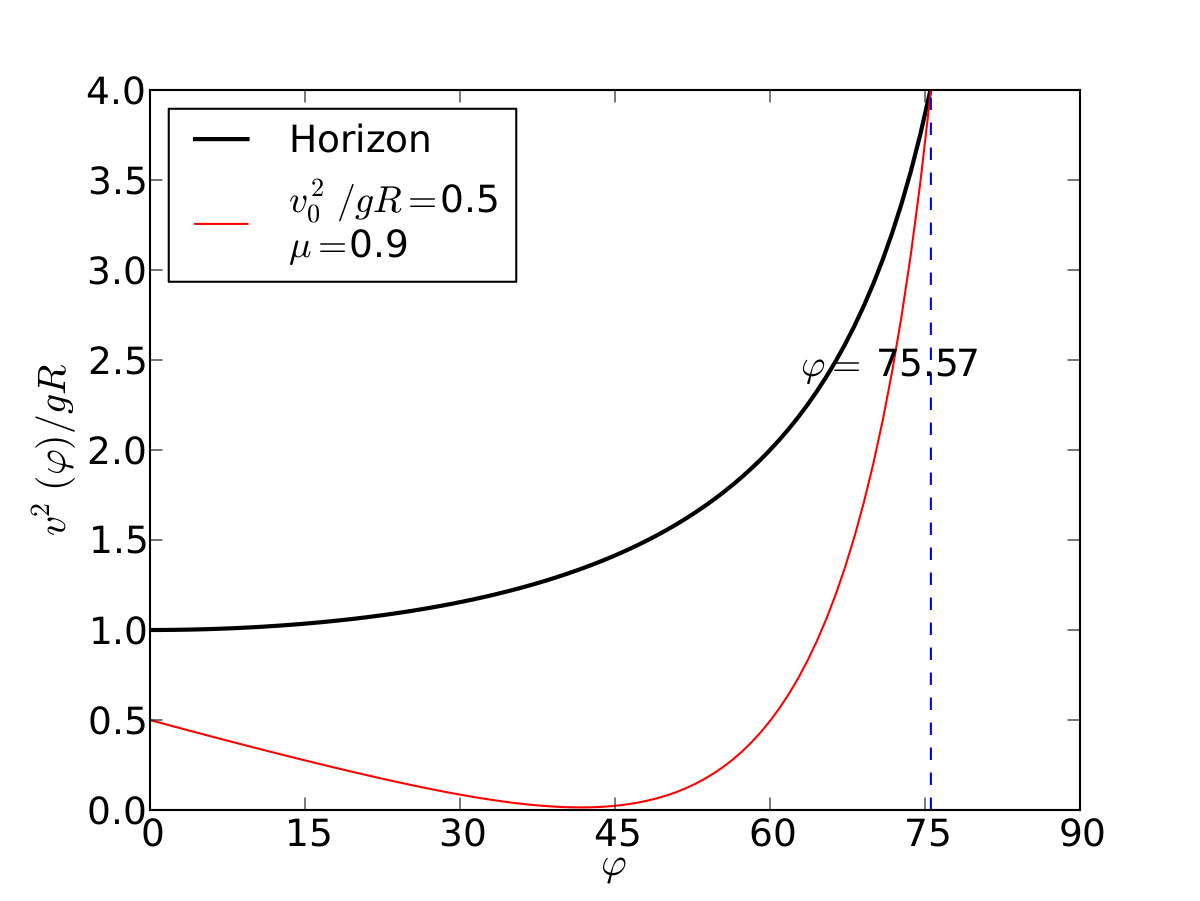
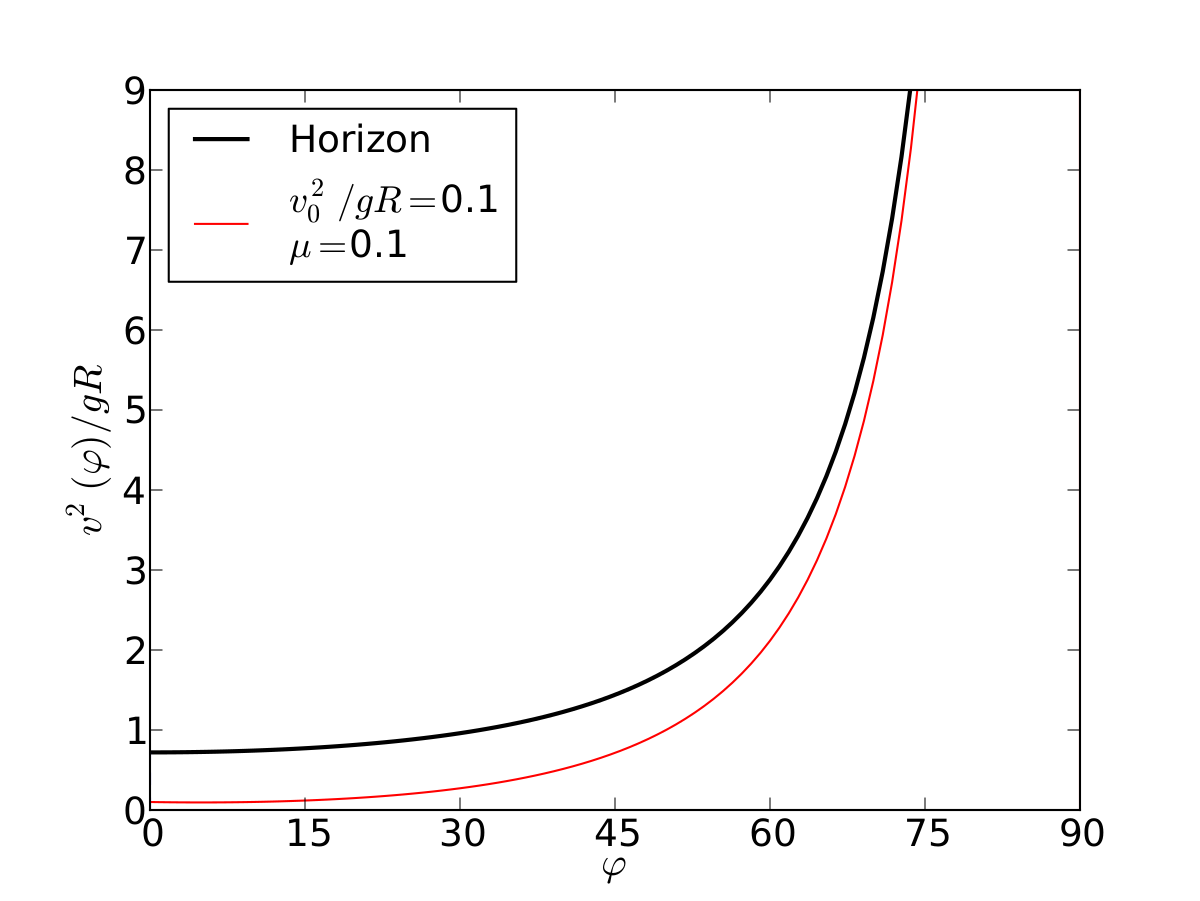
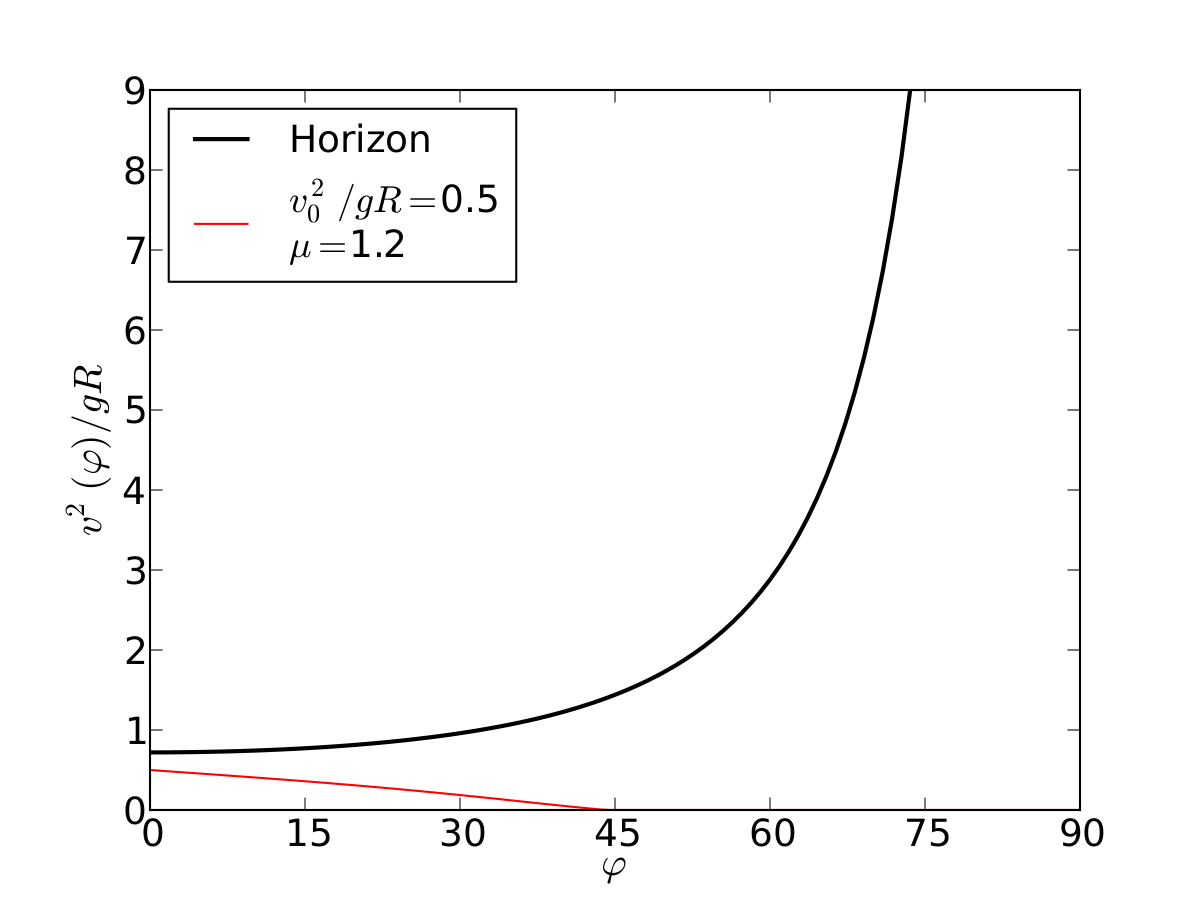
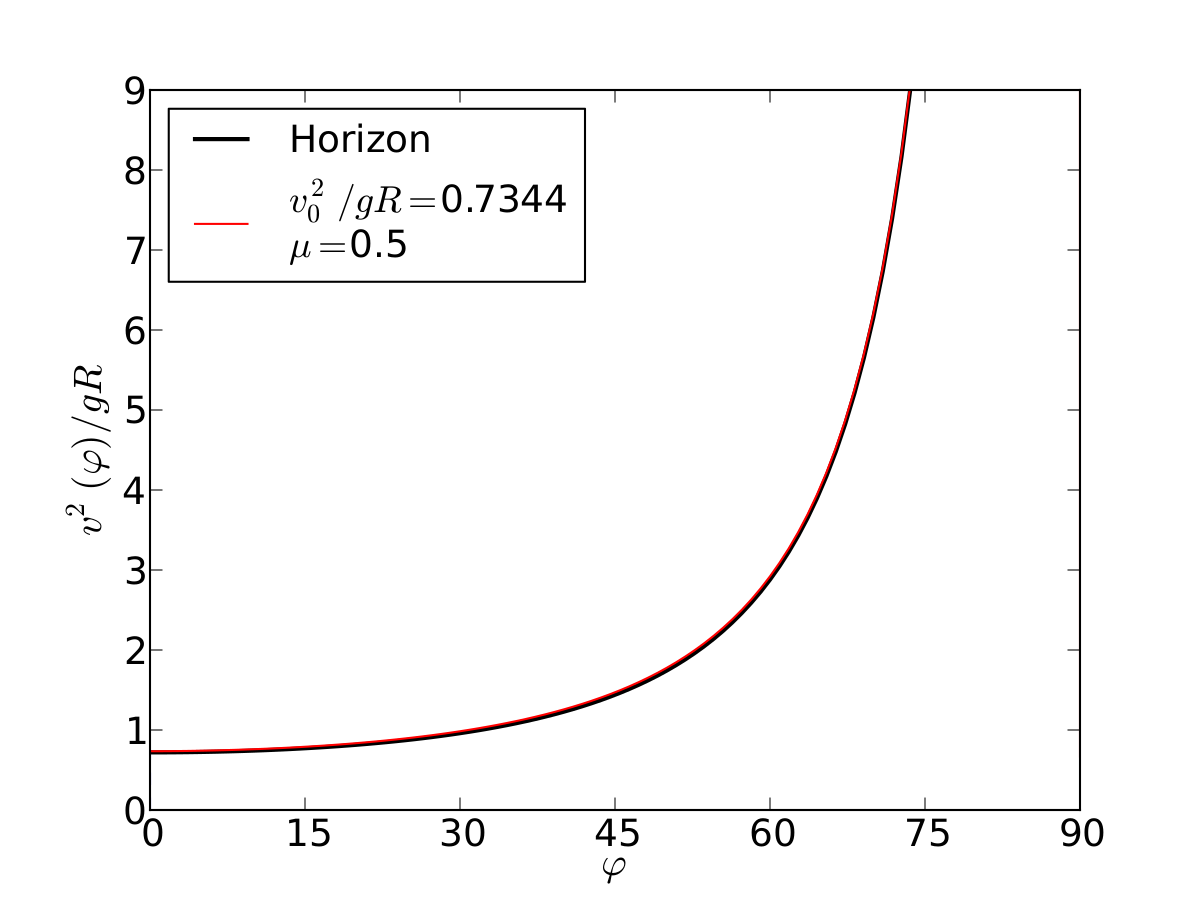
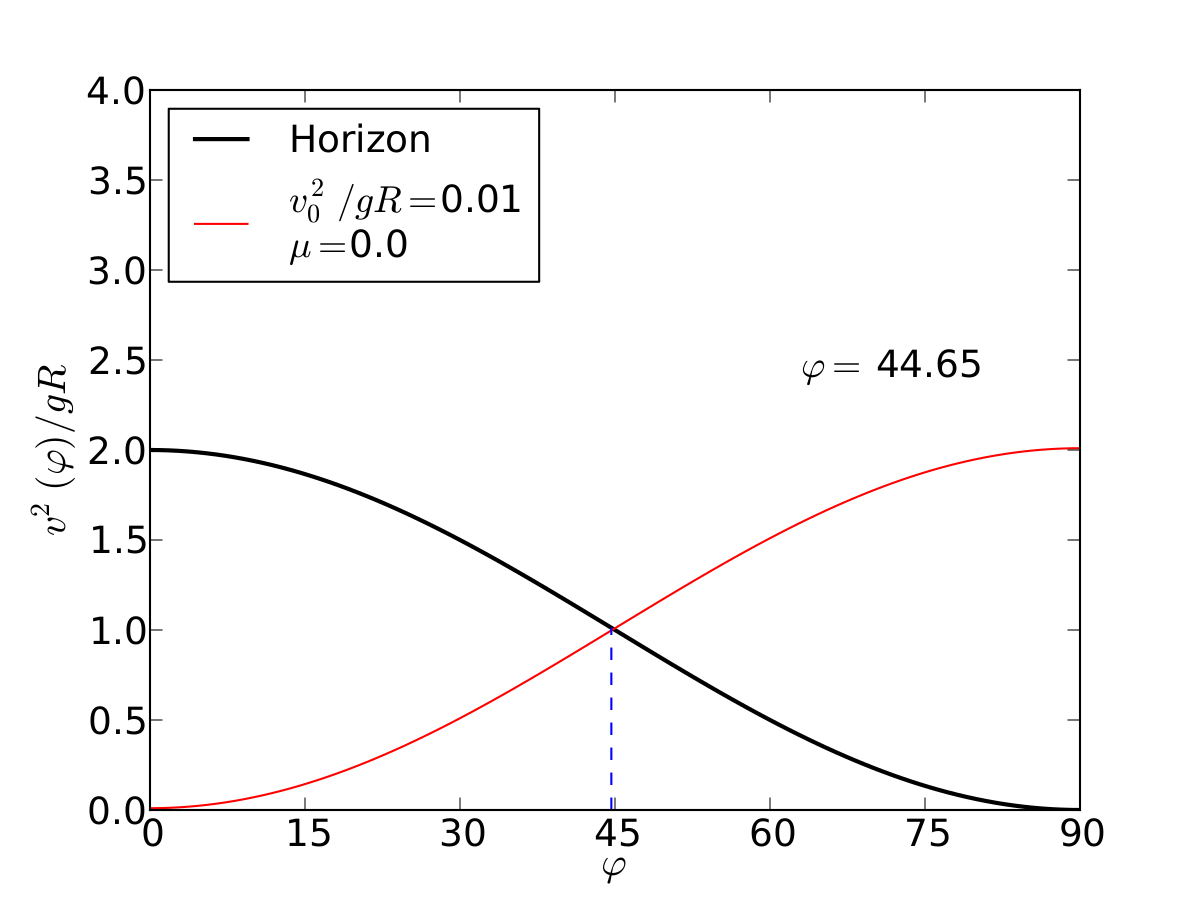
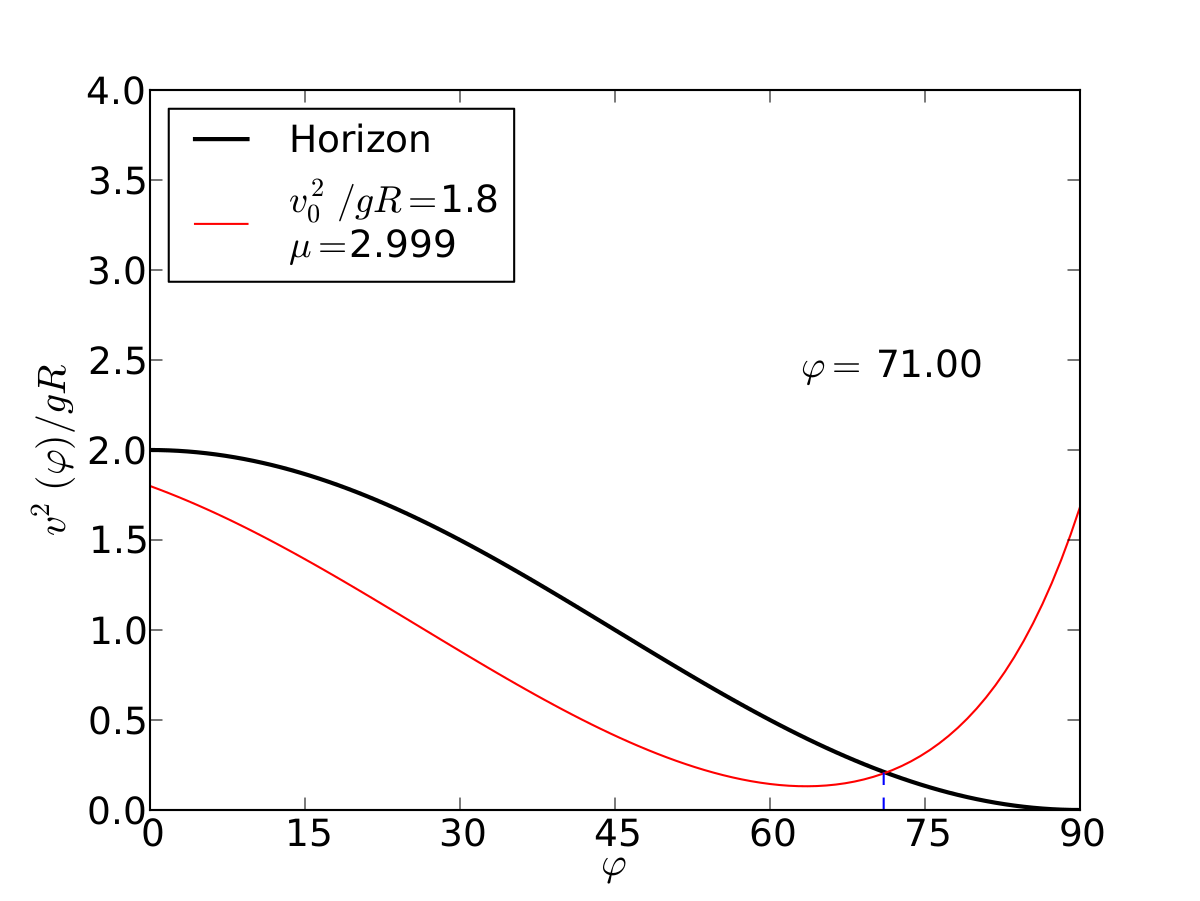
A skier (or particle) that slides on a circular surface departs from it when the normal force is zero. Finding the angle of departure is a typical problem of basic mechanics. Here, we include friction and also generalize to an arbitrary surface.
SOURCES
Sliding down an arbitrary curve in the presence of friction,F. González-Cataldo, Gonzalo Gutiérrez and Julio Yáñez.
American Journal of Physics 85, 108 (2017). Available on the arXiv.
EXAMPLES
PLOTTING CODE
|
Circle | |
|---|---|
|
| |
|
| |
 |
 |
|
| |
 |
 |
|
| |
 |
 |
|
| |
 |
 |
|
Ellipse | |
|
| |
|
| |
 |
 |
|
| |
 |
 |
|
Catenary | |
|
| |
|
| |
 |
 |
|
| |
 |
 |
|
Parabola | |
|
| |
|
| |
 |
 |
|
| |
 |
 |
|
| |
 |
 |
|
Cycloid | |
|
| |
|
| |
 |
 |
|
| |
 |
 |
Code (python)
#****************************************************************#
#* SLIDING DOWN AN ARBITRARY CURVE *#
#* IN THE PRESENCE OF FRICTION *#
#* *#
#* This program animates a particle sliding on a curved *#
#* surface with a friction coefficient mu. *#
#* More information in: *#
#* F. González-Cataldo et al. Am. J. of Phys. 85, 108 (2017). *#
#* and https://arxiv.org/abs/1512.00515. *#
#****************************************************************#
# AUTHOR: FELIPE GONZALEZ CATALDO, July 2015.
#!/usr/bin/python
from numpy import *
from pylab import *
import scipy.integrate as integrate
from scipy.integrate import quad
import matplotlib.animation as animation
g = 9.8 # acceleration due to gravity, in m/s^2
R = 1.0 # length of pendulum 1 in m
dt = 0.02
tmax = 0.8
xmin, xmax = -5*R, 5*R
ymin, ymax = -5*R, 2*R
# th0 initial angle
case = 'circle'
gamma=1.0
th0 = 0.0
vo2 = 0.09*g*R
mu = 0.1
alphas = linspace(0,2*pi,100)
if case=='circle':
tmax = 1.5
xmin, xmax = -2*R, 2*R
ymin, ymax = -2*R, 2*R
alphas = linspace(0,2*pi,100)
elif case=='ellipse':
tmax = 2.0
gamma=0.3
L = 2*R if gamma<1 else 2.0*gamma*R
xmin, xmax = -L, L
ymin, ymax = -L, L
alphas = linspace(0,2*pi,100)
elif case=='parabola':
tmax = 3.0
gamma=1.2
L = 5*R*gamma
xmin, xmax = -L, L
ymin, ymax = -4*L, 2*R
alphas = linspace(-10,10,100)
elif case=='catenary':
tmax = 3.0
L = 4*R
xmin, xmax = -L, L
ymin, ymax = -4*L, L
alphas = linspace(-5,5,100)
elif case=='cycloid':
tmax = 2.2
L = 3*R
xmin, xmax = -L, L
ymin, ymax = -L, L
alphas = linspace(-4*pi,4*pi,100)
########### PARTICLE POSITION PARAMETRIZATION #############
def r(alpha):
if case=='circle':
return R*sin(alpha), R*cos(alpha)
elif case=='ellipse':
return R*gamma*sin(alpha), R*cos(alpha)
elif case=='parabola':
return R*gamma*alpha, R*(1-alpha**2)
elif case=='catenary':
return R*alpha, R*(2.0-cosh(alpha))
elif case=='cycloid':
return 0.5*R*(alpha+sin(alpha)), 0.5*R*(1.0+cos(alpha))
def alpha(phi):
if case=='circle':
return phi
elif case=='ellipse':
return arctan(gamma*tan(phi))
elif case=='parabola':
return 0.5*gamma*tan(phi)
elif case=='catenary':
return arcsinh(tan(phi))
elif case=='cycloid':
return 2*phi
def drdp(phi): # dr/dphi = r'(phi)
drda = 0.0
drdp = 0.0
if case=='circle':
drda = R
dadp = 1.0
elif case=='ellipse':
drda = sqrt( (R*gamma*cos(alpha(phi)))**2 + (R*sin(alpha(phi)))**2 )
dadp = gamma/(cos(phi)**2+gamma**2*sin(phi)**2)
elif case=='parabola':
drda = sqrt( gamma**2 + 4*alpha(phi)**2 )
dadp = 0.5*gamma/cos(phi)**2
elif case=='catenary':
drda = R*cosh(alpha(phi))
dadp = 1.0/cos(phi)
elif case=='cycloid':
drda = R*cos(0.5*alpha(phi))
dadp = 2.0
return drda*dadp
def horizon(phi):
if case=='circle':
return cos(phi)
elif case=='ellipse':
return gamma**2*cos(phi)/(gamma**2*sin(phi)**2+cos(phi)**2)**1.5
elif case=='parabola':
return 0.5*gamma**2/cos(phi)**2
elif case=='catenary':
return 1.0/cos(phi)
elif case=='cycloid':
return 2.0*cos(phi)**2
############### CALCULATE THE VELOCITY ##################
def kappa(phi):
if case=='circle':
return 1.0/R
elif case=='ellipse':
return (gamma**2*sin(phi)**2+cos(phi)**2)**1.5/(gamma**2*R)
elif case=='parabola':
return 2*cos(phi)**3/(gamma**2*R)
elif case=='catenary':
return cos(phi)**2/R
elif case=='cycloid':
return 1.0/(2*R*cos(phi))
def integrand(phi, mu):
return (sin(phi)-mu*cos(phi))*exp(-2*mu*phi)/(R*kappa(phi))
def integral(phi,mu):
return quad(integrand, 0, phi, args=(mu))[0]
def velocity2(phi,mu,vo2):
return g*R*exp(2*mu*phi)*(vo2/(g*R)+2*integral(phi,mu))
#########################################################
############## SOLVE DIFF. EQUATIONS #####################
def IntegrateODE(state, t):
# state = ( phi )
dydx = zeros_like(state) # dydx = dy/dx = function derivatives
# dydx[0] = sqrt(velocity2(state[0],mu,vo2))/drdp(state[0]) # dy/dx = dphi/dt = v(phi)/|dr/dphi|
# SINCE dphi/dt = v(phi)/|dr/dphi| < sqrt(gRH)/|dr/dphi|, the right-hand side limits the values of interest
vel = velocity2(state[0],mu,vo2) if velocity2(state[0],mu,vo2)>0.0 else 0.0
value = sqrt(vel)/drdp(state[0]) # dy/dx = dphi/dt = v(phi)/|dr/dphi|
dydx[0] = value if value<=sqrt(g*R*horizon(state[0]))/drdp(state[0]) else 0.0
return dydx
# create a time array from 0..100 sampled at 0.05 second steps
t = arange(0.0, tmax, dt)
# initial state
state = array([th0])
# integrate your ODE using scipy.integrate.
y = integrate.odeint(IntegrateODE, state, t)
#########################################################
############## PARAMETRIZE TRAJECTORY ####################
pf = 0
t0 = 0
step = 0
x1 = []
y1 = []
for i in xrange(len(t)):
p = y[:,0][i] if i<len(y[:,0]) and y[:,0][i]<=0.5*pi else 0.999*pi/2
if velocity2(p,mu,vo2)/(g*R) <= horizon(p) and step==0:
x1 += [ r(alpha(p))[0] ] #[R*gamma*sin(alpha(p))]
y1 += [ r(alpha(p))[1] ] #[R*cos(alpha(p))]
t0 = t[i]
# print "Primer caso: velocity2(p,mu,vo2)/(g*R)=",velocity2(p,mu,vo2)/(g*R),"menor que",horizon(p),"para i=",i,"y=phi(t)=",p*180/pi
elif velocity2(p,mu,vo2)/(g*R) > horizon(p):
if step==0:
step = i
pf = 0.5*(y[:,0][i] + y[:,0][i-1])
x1 += [ r(alpha(pf))[0] + sqrt(velocity2(pf,mu,vo2))*cos(pf)*(t[i]-t0) ]
y1 += [ r(alpha(pf))[1] - sqrt(velocity2(pf,mu,vo2))*sin(pf)*(t[i]-t0) - 0.5*g*(t[i]-t0)**2 ]
#print "Supero horizonte: velocity2(p,mu,vo2)/(g*R)=",velocity2(p,mu,vo2)/(g*R),"mayor que",horizon(p),"para i=",i,"y=phi(t)=",p*180/pi
elif velocity2(p,mu,vo2)<=0: # If the particle gets stuck
x1 += [ r(alpha(pf))[0] ] #[R*gamma*sin(alpha(pf))]
y1 += [ r(alpha(pf))[1] ] # [R*cos(alpha(pf))]
else:
print "No se cumple ni una en i=",i,"t[i]=",t[i],"phi[i]=",y[i]*180/pi
print "Porque velocity2(p,mu,vo2)/(g*R)=",velocity2(p,mu,vo2)/(g*R),"no es menor que",horizon(p),"y=phi(t)=",p*180/pi
x1 = array(x1)
y1 = array(y1)
#########################################################
############## DRAW SURFACE ####################
fig = plt.figure()#figsize=(0.7*8,0.7*6))
params = {'legend.fontsize':18, 'text.fontsize':28,'xtick.labelsize':18, 'ytick.labelsize':18, 'xtick.labelsize':18, 'axes.labelsize':19,'xtick.major.size':6,'ytick.major.size':6}
rcParams.update(params)
ax = fig.add_subplot(111, autoscale_on=False, xlim=(xmin, xmax), ylim=(ymin, ymax), aspect='auto')
ax.grid(lw=1)
x_s = r(alphas)[0] #R*gamma*sin(phi)
y_s = r(alphas)[1] #R*cos(phi)
surface, = ax.plot( x_s, y_s, '-', lw=3)
floor, = ax.plot( linspace(xmin,xmax,100), [0.0]*100, '-k', lw=2)
line1, = ax.plot([],[], '--b', lw=1)
line2, = ax.plot([],[], '--g', lw=1)
mass, = ax.plot([],[], 'ro', ms=15)
#########################################################
################# ANIMATION ############################
time_text = ax.text(0.05, 0.88, '', transform=ax.transAxes,fontsize=18)
t_text = ax.text(0.05, 0.83, '', transform=ax.transAxes,fontsize=18)
phi_text = ax.text(0.05, 0.78, '', transform=ax.transAxes,fontsize=18)
def init():
line1.set_data([], [])
line2.set_data([], [])
mass.set_data([], [])
time_text.set_text('')
phi_text.set_text('')
t_text.set_text('')
return mass, line1, line2, time_text, phi_text, t_text
def animate(i):
line1x = [(x1[i],xmax) if i<step or step==0 else (x1[step],xmax) ]
line1y = [(y1[i],y1[i]) if i<step or step==0 else (y1[step],y1[step])]
line2x = [(x1[i],x1[i]+2*xmax*cos(y[:,0][i])) if i<step or step==0 else (x1[step],x1[step]+2*xmax*cos(y[:,0][step]))]
line2y = [(y1[i],y1[i]-2*xmax*sin(y[:,0][i])) if i<step or step==0 else (y1[step],y1[step]-2*xmax*sin(y[:,0][step]))]
line1.set_data(line1x, line1y)
line2.set_data(line2x, line2y)
mass.set_data(x1[i], y1[i])
# TEXT
my_t = i*dt if i<step else step*dt
text_phi = (y[:,0][i]*180/pi) if i<step or step==0 else (pf*180/pi)
time_text.set_text('Time = %.1fs'%(i*dt))
t_text.set_text('t=%.2f'%my_t)
phi_text.set_text(r'$\varphi$ = %.2f'%text_phi)
return mass, line1, line2, time_text, phi_text, t_text
axis('equal')
#ani = animation.FuncAnimation(fig, animate, arange(1, len(t)), interval=50, blit=True, init_func=init)#,repeat_delay=1000)
ani = animation.FuncAnimation(fig, animate, arange(1, len(t)), interval=50, blit=False, init_func=init)#,repeat_delay=1000)
# t_video = Nframes/fps = len(t)/fps
# fps <= Nframes/2 ( or you get bad quality, due to interpolation)
#ani.save('ejemplo.mp4', fps=0.4*len(t)/2) # Video lasts t_video = len(t)/fps = len(t)/(0.4*len(t)/2) = 2/0.4 = 5 sec
fig = plt.figure(2)
params = {'legend.fontsize':18, 'text.fontsize':18,'xtick.labelsize':18, 'ytick.labelsize':18, 'xtick.labelsize':18, 'axes.labelsize':19,'xtick.major.size':6,'ytick.major.size':6}
rcParams.update(params)
ax = fig.add_subplot(111)
mgr = get_current_fig_manager()
#mgr.window.wm_geometry("+600+55")
ymax = horizon(0)
if horizon(0)<1:
ymax = 1.0
elif horizon(0)>4:
ymax = 9.0
xlim(0,0.5*pi)
ylim(0,ymax)
xlabel(r'$\varphi$')
ylabel(r'$v^2(\varphi)/gR$')
xticks( [0,pi/12,2*pi/12,3*pi/12,4*pi/12,5*pi/12,6*pi/12], [0,15,30,45,60,75,90] )
phis = [p for p in linspace(0,0.5*pi,100)]
vels = [velocity2(p,mu,vo2)/(g*R) for p in phis ]
j=0
for i in xrange(len(vels)):
if vels[i]<0: j=i
if j>0: vels[i]=0.0
horz = [horizon(p) for p in phis]
dashed = linspace(0,horizon(pf))
ax.plot(phis , horz, '-k', lw=2,label='Horizon')
ax.plot(phis , vels, '-r',label=r'$v_0^2/gR=$'+str(vo2/(g*R))+'\n$\mu=$'+str(mu))
ax.plot( [ pf ]*len(dashed) , dashed , '--')
text= ax.text(0.7, 0.6, r'$\varphi=$ %.2f'%(pf*180/pi), transform=ax.transAxes, fontsize=18)
legend(loc=1)
#savefig('ejemplo.pdf')
plt.show()
#* SLIDING DOWN AN ARBITRARY CURVE *#
#* IN THE PRESENCE OF FRICTION *#
#* *#
#* This program animates a particle sliding on a curved *#
#* surface with a friction coefficient mu. *#
#* More information in: *#
#* F. González-Cataldo et al. Am. J. of Phys. 85, 108 (2017). *#
#* and https://arxiv.org/abs/1512.00515. *#
#****************************************************************#
# AUTHOR: FELIPE GONZALEZ CATALDO, July 2015.
#!/usr/bin/python
from numpy import *
from pylab import *
import scipy.integrate as integrate
from scipy.integrate import quad
import matplotlib.animation as animation
g = 9.8 # acceleration due to gravity, in m/s^2
R = 1.0 # length of pendulum 1 in m
dt = 0.02
tmax = 0.8
xmin, xmax = -5*R, 5*R
ymin, ymax = -5*R, 2*R
# th0 initial angle
case = 'circle'
gamma=1.0
th0 = 0.0
vo2 = 0.09*g*R
mu = 0.1
alphas = linspace(0,2*pi,100)
if case=='circle':
tmax = 1.5
xmin, xmax = -2*R, 2*R
ymin, ymax = -2*R, 2*R
alphas = linspace(0,2*pi,100)
elif case=='ellipse':
tmax = 2.0
gamma=0.3
L = 2*R if gamma<1 else 2.0*gamma*R
xmin, xmax = -L, L
ymin, ymax = -L, L
alphas = linspace(0,2*pi,100)
elif case=='parabola':
tmax = 3.0
gamma=1.2
L = 5*R*gamma
xmin, xmax = -L, L
ymin, ymax = -4*L, 2*R
alphas = linspace(-10,10,100)
elif case=='catenary':
tmax = 3.0
L = 4*R
xmin, xmax = -L, L
ymin, ymax = -4*L, L
alphas = linspace(-5,5,100)
elif case=='cycloid':
tmax = 2.2
L = 3*R
xmin, xmax = -L, L
ymin, ymax = -L, L
alphas = linspace(-4*pi,4*pi,100)
########### PARTICLE POSITION PARAMETRIZATION #############
def r(alpha):
if case=='circle':
return R*sin(alpha), R*cos(alpha)
elif case=='ellipse':
return R*gamma*sin(alpha), R*cos(alpha)
elif case=='parabola':
return R*gamma*alpha, R*(1-alpha**2)
elif case=='catenary':
return R*alpha, R*(2.0-cosh(alpha))
elif case=='cycloid':
return 0.5*R*(alpha+sin(alpha)), 0.5*R*(1.0+cos(alpha))
def alpha(phi):
if case=='circle':
return phi
elif case=='ellipse':
return arctan(gamma*tan(phi))
elif case=='parabola':
return 0.5*gamma*tan(phi)
elif case=='catenary':
return arcsinh(tan(phi))
elif case=='cycloid':
return 2*phi
def drdp(phi): # dr/dphi = r'(phi)
drda = 0.0
drdp = 0.0
if case=='circle':
drda = R
dadp = 1.0
elif case=='ellipse':
drda = sqrt( (R*gamma*cos(alpha(phi)))**2 + (R*sin(alpha(phi)))**2 )
dadp = gamma/(cos(phi)**2+gamma**2*sin(phi)**2)
elif case=='parabola':
drda = sqrt( gamma**2 + 4*alpha(phi)**2 )
dadp = 0.5*gamma/cos(phi)**2
elif case=='catenary':
drda = R*cosh(alpha(phi))
dadp = 1.0/cos(phi)
elif case=='cycloid':
drda = R*cos(0.5*alpha(phi))
dadp = 2.0
return drda*dadp
def horizon(phi):
if case=='circle':
return cos(phi)
elif case=='ellipse':
return gamma**2*cos(phi)/(gamma**2*sin(phi)**2+cos(phi)**2)**1.5
elif case=='parabola':
return 0.5*gamma**2/cos(phi)**2
elif case=='catenary':
return 1.0/cos(phi)
elif case=='cycloid':
return 2.0*cos(phi)**2
############### CALCULATE THE VELOCITY ##################
def kappa(phi):
if case=='circle':
return 1.0/R
elif case=='ellipse':
return (gamma**2*sin(phi)**2+cos(phi)**2)**1.5/(gamma**2*R)
elif case=='parabola':
return 2*cos(phi)**3/(gamma**2*R)
elif case=='catenary':
return cos(phi)**2/R
elif case=='cycloid':
return 1.0/(2*R*cos(phi))
def integrand(phi, mu):
return (sin(phi)-mu*cos(phi))*exp(-2*mu*phi)/(R*kappa(phi))
def integral(phi,mu):
return quad(integrand, 0, phi, args=(mu))[0]
def velocity2(phi,mu,vo2):
return g*R*exp(2*mu*phi)*(vo2/(g*R)+2*integral(phi,mu))
#########################################################
############## SOLVE DIFF. EQUATIONS #####################
def IntegrateODE(state, t):
# state = ( phi )
dydx = zeros_like(state) # dydx = dy/dx = function derivatives
# dydx[0] = sqrt(velocity2(state[0],mu,vo2))/drdp(state[0]) # dy/dx = dphi/dt = v(phi)/|dr/dphi|
# SINCE dphi/dt = v(phi)/|dr/dphi| < sqrt(gRH)/|dr/dphi|, the right-hand side limits the values of interest
vel = velocity2(state[0],mu,vo2) if velocity2(state[0],mu,vo2)>0.0 else 0.0
value = sqrt(vel)/drdp(state[0]) # dy/dx = dphi/dt = v(phi)/|dr/dphi|
dydx[0] = value if value<=sqrt(g*R*horizon(state[0]))/drdp(state[0]) else 0.0
return dydx
# create a time array from 0..100 sampled at 0.05 second steps
t = arange(0.0, tmax, dt)
# initial state
state = array([th0])
# integrate your ODE using scipy.integrate.
y = integrate.odeint(IntegrateODE, state, t)
#########################################################
############## PARAMETRIZE TRAJECTORY ####################
pf = 0
t0 = 0
step = 0
x1 = []
y1 = []
for i in xrange(len(t)):
p = y[:,0][i] if i<len(y[:,0]) and y[:,0][i]<=0.5*pi else 0.999*pi/2
if velocity2(p,mu,vo2)/(g*R) <= horizon(p) and step==0:
x1 += [ r(alpha(p))[0] ] #[R*gamma*sin(alpha(p))]
y1 += [ r(alpha(p))[1] ] #[R*cos(alpha(p))]
t0 = t[i]
# print "Primer caso: velocity2(p,mu,vo2)/(g*R)=",velocity2(p,mu,vo2)/(g*R),"menor que",horizon(p),"para i=",i,"y=phi(t)=",p*180/pi
elif velocity2(p,mu,vo2)/(g*R) > horizon(p):
if step==0:
step = i
pf = 0.5*(y[:,0][i] + y[:,0][i-1])
x1 += [ r(alpha(pf))[0] + sqrt(velocity2(pf,mu,vo2))*cos(pf)*(t[i]-t0) ]
y1 += [ r(alpha(pf))[1] - sqrt(velocity2(pf,mu,vo2))*sin(pf)*(t[i]-t0) - 0.5*g*(t[i]-t0)**2 ]
#print "Supero horizonte: velocity2(p,mu,vo2)/(g*R)=",velocity2(p,mu,vo2)/(g*R),"mayor que",horizon(p),"para i=",i,"y=phi(t)=",p*180/pi
elif velocity2(p,mu,vo2)<=0: # If the particle gets stuck
x1 += [ r(alpha(pf))[0] ] #[R*gamma*sin(alpha(pf))]
y1 += [ r(alpha(pf))[1] ] # [R*cos(alpha(pf))]
else:
print "No se cumple ni una en i=",i,"t[i]=",t[i],"phi[i]=",y[i]*180/pi
print "Porque velocity2(p,mu,vo2)/(g*R)=",velocity2(p,mu,vo2)/(g*R),"no es menor que",horizon(p),"y=phi(t)=",p*180/pi
x1 = array(x1)
y1 = array(y1)
#########################################################
############## DRAW SURFACE ####################
fig = plt.figure()#figsize=(0.7*8,0.7*6))
params = {'legend.fontsize':18, 'text.fontsize':28,'xtick.labelsize':18, 'ytick.labelsize':18, 'xtick.labelsize':18, 'axes.labelsize':19,'xtick.major.size':6,'ytick.major.size':6}
rcParams.update(params)
ax = fig.add_subplot(111, autoscale_on=False, xlim=(xmin, xmax), ylim=(ymin, ymax), aspect='auto')
ax.grid(lw=1)
x_s = r(alphas)[0] #R*gamma*sin(phi)
y_s = r(alphas)[1] #R*cos(phi)
surface, = ax.plot( x_s, y_s, '-', lw=3)
floor, = ax.plot( linspace(xmin,xmax,100), [0.0]*100, '-k', lw=2)
line1, = ax.plot([],[], '--b', lw=1)
line2, = ax.plot([],[], '--g', lw=1)
mass, = ax.plot([],[], 'ro', ms=15)
#########################################################
################# ANIMATION ############################
time_text = ax.text(0.05, 0.88, '', transform=ax.transAxes,fontsize=18)
t_text = ax.text(0.05, 0.83, '', transform=ax.transAxes,fontsize=18)
phi_text = ax.text(0.05, 0.78, '', transform=ax.transAxes,fontsize=18)
def init():
line1.set_data([], [])
line2.set_data([], [])
mass.set_data([], [])
time_text.set_text('')
phi_text.set_text('')
t_text.set_text('')
return mass, line1, line2, time_text, phi_text, t_text
def animate(i):
line1x = [(x1[i],xmax) if i<step or step==0 else (x1[step],xmax) ]
line1y = [(y1[i],y1[i]) if i<step or step==0 else (y1[step],y1[step])]
line2x = [(x1[i],x1[i]+2*xmax*cos(y[:,0][i])) if i<step or step==0 else (x1[step],x1[step]+2*xmax*cos(y[:,0][step]))]
line2y = [(y1[i],y1[i]-2*xmax*sin(y[:,0][i])) if i<step or step==0 else (y1[step],y1[step]-2*xmax*sin(y[:,0][step]))]
line1.set_data(line1x, line1y)
line2.set_data(line2x, line2y)
mass.set_data(x1[i], y1[i])
# TEXT
my_t = i*dt if i<step else step*dt
text_phi = (y[:,0][i]*180/pi) if i<step or step==0 else (pf*180/pi)
time_text.set_text('Time = %.1fs'%(i*dt))
t_text.set_text('t=%.2f'%my_t)
phi_text.set_text(r'$\varphi$ = %.2f'%text_phi)
return mass, line1, line2, time_text, phi_text, t_text
axis('equal')
#ani = animation.FuncAnimation(fig, animate, arange(1, len(t)), interval=50, blit=True, init_func=init)#,repeat_delay=1000)
ani = animation.FuncAnimation(fig, animate, arange(1, len(t)), interval=50, blit=False, init_func=init)#,repeat_delay=1000)
# t_video = Nframes/fps = len(t)/fps
# fps <= Nframes/2 ( or you get bad quality, due to interpolation)
#ani.save('ejemplo.mp4', fps=0.4*len(t)/2) # Video lasts t_video = len(t)/fps = len(t)/(0.4*len(t)/2) = 2/0.4 = 5 sec
fig = plt.figure(2)
params = {'legend.fontsize':18, 'text.fontsize':18,'xtick.labelsize':18, 'ytick.labelsize':18, 'xtick.labelsize':18, 'axes.labelsize':19,'xtick.major.size':6,'ytick.major.size':6}
rcParams.update(params)
ax = fig.add_subplot(111)
mgr = get_current_fig_manager()
#mgr.window.wm_geometry("+600+55")
ymax = horizon(0)
if horizon(0)<1:
ymax = 1.0
elif horizon(0)>4:
ymax = 9.0
xlim(0,0.5*pi)
ylim(0,ymax)
xlabel(r'$\varphi$')
ylabel(r'$v^2(\varphi)/gR$')
xticks( [0,pi/12,2*pi/12,3*pi/12,4*pi/12,5*pi/12,6*pi/12], [0,15,30,45,60,75,90] )
phis = [p for p in linspace(0,0.5*pi,100)]
vels = [velocity2(p,mu,vo2)/(g*R) for p in phis ]
j=0
for i in xrange(len(vels)):
if vels[i]<0: j=i
if j>0: vels[i]=0.0
horz = [horizon(p) for p in phis]
dashed = linspace(0,horizon(pf))
ax.plot(phis , horz, '-k', lw=2,label='Horizon')
ax.plot(phis , vels, '-r',label=r'$v_0^2/gR=$'+str(vo2/(g*R))+'\n$\mu=$'+str(mu))
ax.plot( [ pf ]*len(dashed) , dashed , '--')
text= ax.text(0.7, 0.6, r'$\varphi=$ %.2f'%(pf*180/pi), transform=ax.transAxes, fontsize=18)
legend(loc=1)
#savefig('ejemplo.pdf')
plt.show()
Executing the program
To execute the program, save the code above as "sliding-with-friction.py" and execute
python sliding-with-friction.py
This will generate the animation. If you want to save the animation, uncomment the line
#savefig('example.pdf')